Definition
Run-to-completion is the guarantee that the processing of an event can't be interrupted by the processing of another event.
The simplest way to explain what run-to-completion is is to show what happens when it isn't guaranteed. Say you have a state machine of this form:
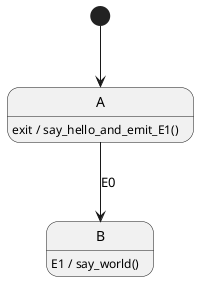
Its actions are the following:
- say_hello_and_emit_E1(), which outputs "Hello," and emits the event E1 (in this order);
- say_world(), which outputs " World!".
Whenever the active state is A and the event E0 occurs, the state machine transitions from A to B and processes the event E1.
With run-to-completion, you'd have gotten this output:
Without run-to-completion, you get this one:
Frightening.
What is happening is that the processing of E0 and the processing of E1 are intertwined; the state machine:
- performs some steps of the processing of E0 (namely, invoking the exit action of A);
- processes E1 from beginning to end;
- performs the remaining steps of the processing of E0 (namely, invoking the entry action of B and marking it as the active state).
Because of this, the state machine processes E1 before it enters B, which results in say_world() not being called.
With run-to-completion, both events would have been fully processed in a sequential way.
When to use run-to-completion
Always use run-to-completion, unless you can't afford its performance penalty.
This feature indeed comes at a cost; to guarantee run-to-completion, a state machine library must use a queue of some sort to store the events its client asks to process while it's busy. This might involve memory allocation.
Obviously, if you dare disabling it, be absolutely sure none of your actions asks to process an event, neither directly nor indirectly. But be assured that the bigger your program and your development team, the harder it is to enforce.
How to enable run-to-completion within Maki
Being a safety feature, run-to-completion is enabled by default. You can disable it like so: