Definition
A guard is associated with a transition. It is a condition for the transition to occur.
On a UML state diagram, it is represented between square brackets in the transition label:
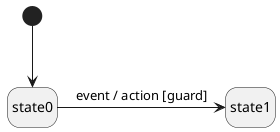
A guard
In the above example, the state machine transitions from state0 to state1 and executes action provided guard is true. If guard is false, nothing happens.
Guards can be based on system-wide data (e.g. current temperature) or event data (e.g. button press duration).
When to use a guard
You need guards to express the equivalent of if/else, switch, for or while statements in your state machine.
For example, let's modelize the state machine of a 3-speed fan that remembers its last speed and automatically sets it at startup. Its components include:
- an internal memory (to save last set speed);
- a minus button, to lower the speed;
- a plus button, to raise the speed.
The state machine defines:
- 4 states:
- reading memory, the initial state, in which the fan reads the last saved speed and waits for the memory read event;
- spinning low;
- spinning med;
- spinning high;
- 3 events:
- memory read, emitted when the memory is read, which carries the speed value;
- minus button press;
- plus button press;
- 3 actions:
- set speed low;
- set speed med;
- set speed high.
What about transitions? Transitions between spinning * states should be obvious: we just use the button press events. But how do we get from the reading memory state to these spinning * states?
This is where we need guards. Starting from reading memory, at memory read:
- if the guard memory speed = low, transition to the spinning low state;
- if the guard memory speed = med, transition to the spinning med state;
- if the guard memory speed = high, transition to the spinning high state.
Here is the state machine diagram of our fan:
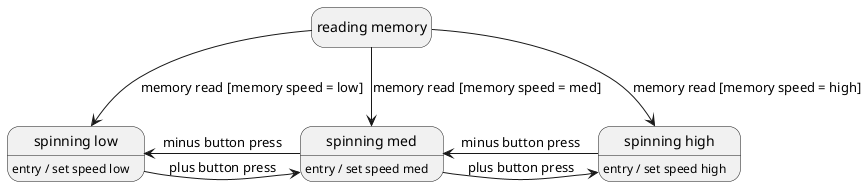
Fan
How to define guards within Maki
The guard is the fifth (optional) parameter of maki::transition_table::operator()(). In this context, Maki expects an instance of maki::guard or maki::null.
(source_state_type, target_state_type, maki::event<event_type>, action, guard)
;
Represents a transition table.
Definition transition_table.hpp:178
Example
Let's implement the state machine of our 3-speed fan.
Our event types are the following. Notice that memory_read carries the fan speed that is read from the fan internal memory:
enum class speed
{
low,
med,
high
};
struct memory_read
{
speed spd = speed::low;
};
struct minus_button_press{};
struct plus_button_press{};
Our guards need to check the value of the speed carried by the memory_read event. Thus, we must use one of the signatures that take the event. As there's no signature that only takes the event, let's use the second one and just ignore the context_type parameter. These are our guards:
constexpr auto is_speed_low =
maki::guard_e([](
const memory_read& event)
{
return event.spd == speed::low;
});
constexpr auto is_speed_med =
maki::guard_e([](
const memory_read& event)
{
return event.spd == speed::med;
});
constexpr auto is_speed_high =
maki::guard_e([](
const memory_read& event)
{
return event.spd == speed::high;
});
Finally, we pass each guard to the transition they're associated with. Once again, our transition table is a direct representation of the state diagram:
(maki::ini, reading_memory)
(reading_memory, spinning_low, maki::event<memory_read>, maki::null, is_speed_low)
(reading_memory, spinning_med, maki::event<memory_read>, maki::null, is_speed_med)
(reading_memory, spinning_high, maki::event<memory_read>, maki::null, is_speed_high)
(spinning_low, spinning_med, maki::event<plus_button_press>, maki::null)
(spinning_med, spinning_high, maki::event<plus_button_press>, maki::null)
(spinning_med, spinning_low, maki::event<minus_button_press>, maki::null)
(spinning_high, spinning_med, maki::event<minus_button_press>, maki::null)
;
Here is a test program for our state machine:
#include <maki.hpp>
#include <functional>
#include <iostream>
struct context{};
enum class speed
{
low,
med,
high
};
struct memory_read
{
speed spd = speed::low;
};
struct minus_button_press{};
struct plus_button_press{};
{
std::cout << "Speed is low\n";
})
;
{
std::cout << "Speed is med\n";
})
;
{
std::cout << "Speed is high\n";
})
;
constexpr auto is_speed_low =
maki::guard_e([](
const memory_read& event)
{
return event.spd == speed::low;
});
constexpr auto is_speed_med =
maki::guard_e([](
const memory_read& event)
{
return event.spd == speed::med;
});
constexpr auto is_speed_high =
maki::guard_e([](
const memory_read& event)
{
return event.spd == speed::high;
});
(maki::ini, reading_memory)
(reading_memory, spinning_low, maki::event<memory_read>, maki::null, is_speed_low)
(reading_memory, spinning_med, maki::event<memory_read>, maki::null, is_speed_med)
(reading_memory, spinning_high, maki::event<memory_read>, maki::null, is_speed_high)
(spinning_low, spinning_med, maki::event<plus_button_press>, maki::null)
(spinning_med, spinning_high, maki::event<plus_button_press>, maki::null)
(spinning_med, spinning_low, maki::event<minus_button_press>, maki::null)
(spinning_high, spinning_med, maki::event<minus_button_press>, maki::null)
;
.context_a<context>()
;
int main()
{
auto machine = machine_t{};
{
machine.process_event(plus_button_press{});
machine.process_event(plus_button_press{});
machine.process_event(plus_button_press{});
machine.process_event(minus_button_press{});
machine.process_event(minus_button_press{});
machine.process_event(minus_button_press{});
}
return 0;
}
The output of this program is the following:
Speed is med
Speed is high
Speed is med
Speed is low